四轴20151002进展
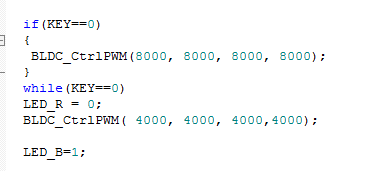
来自:四轴飞行器目前为止已经打通任督二脉,装上螺旋桨就能进入调参阶段了,不爽的一点是电调有个坏的,今天已经发给店家换了,来回又得一星期了。 这几天准备在电调在路上奔波的时间内,开始遥控器的制作,还有补补我拉下的学业。http://yunpan.cn/cH5TyamnrM2Kx 访问密码 4e3f 。今天的代码。 因为是用的程序解锁,开机就会解锁,这样后面比较危险,今天加上了软件解锁,受到特定指令后才允许电机...
STM32L476 Nucleo板卡简介
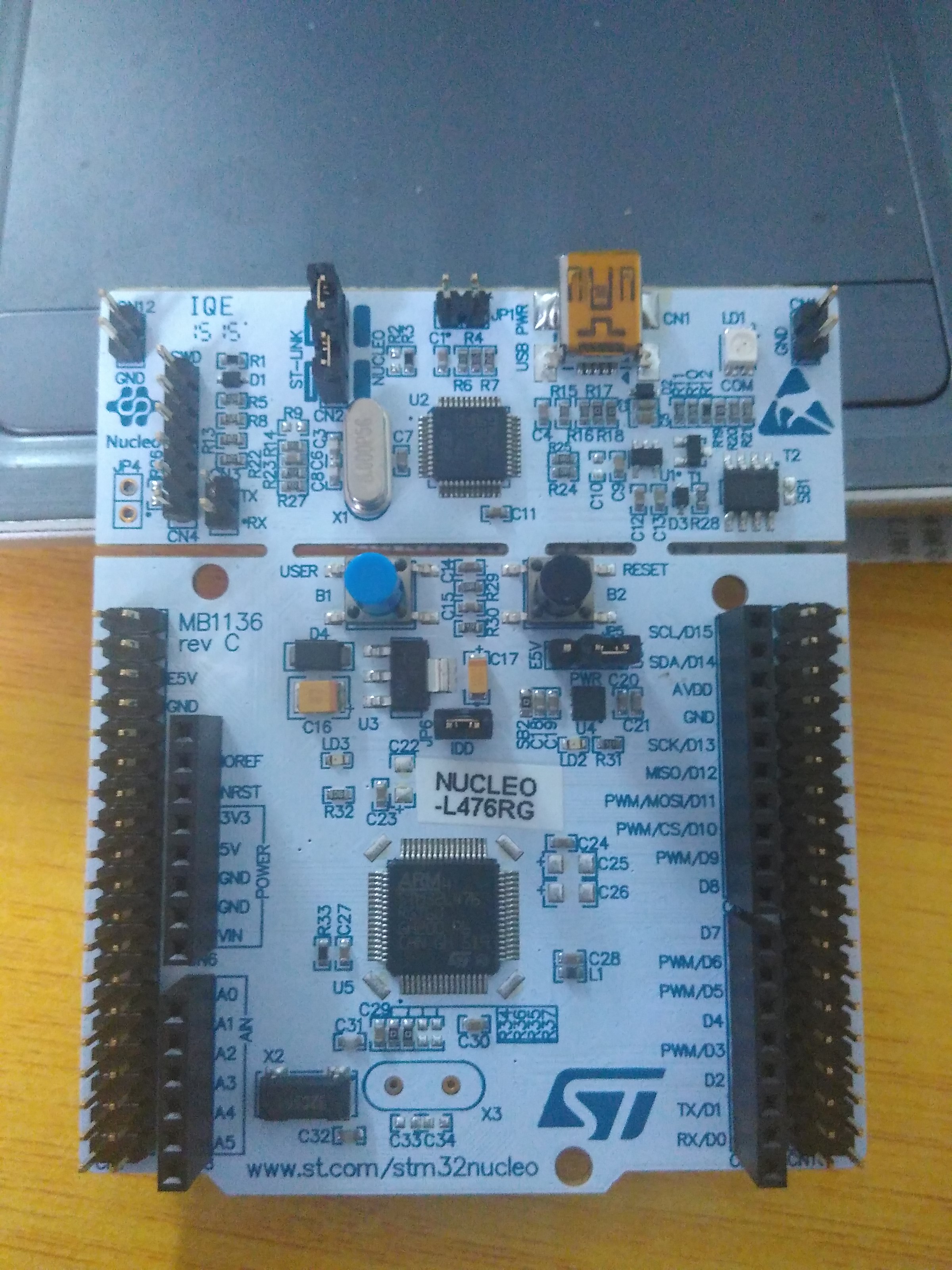
来自:四轴飞行器今天又仔细看看板子真的挺漂亮! 先来看看板卡资源吧 STM32L476RGT6微控制器,基于ARM Cortex-M4处理器,带DSP,支持80MHz主频 支持Arduino UNO R3 Shield扩展板,微控制器所有IO口引脚通过排针座引出 ST-LINK/V2-1调试器,支持对外部微控制器调试 3个LED:一个USB通讯LED、一个电源LED、一个用户LED;两个机械按键:复...

20150923进展
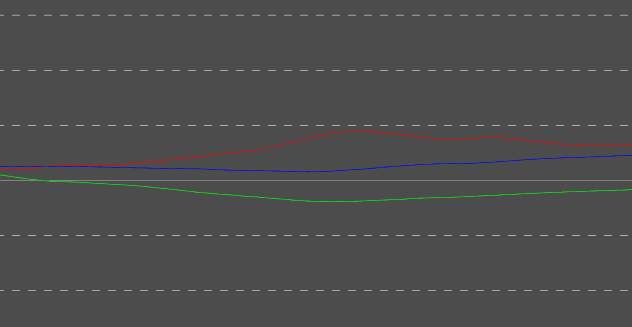
来自:四轴飞行器表示最近生病了,又加上课多,只能晚上搞,几天没啥进展,现在也是有点发烧,头疼,穿的老厚了。贴上昨天的进度,http://pan.baidu.com/s/1kTGlpDd。目前可以说基本完成全部流程了,姿态显示正常,PWM波输出正常,给遥控信号晃动,飞控为了实现目标值,输出PWM正常,因为自己真的没钱买遥控器,正好有个游戏手柄,可以借助圆点博士的上位机实现遥控,所以遥控通讯部分暂时借用了圆点博士的,...
四轴飞行器程序基本思路
来自:四轴飞行器我发了这么多技术贴,如果你没有接触过四轴可能就有点蒙了,这么多到底在四轴中有一个怎么样的顺序,又是怎么实现控制的? 不急,听我慢慢道来,学业不精,大神路过指点一二,小弟谢过! 当然程序的第一步是各种初始化,系统初始化,mpu6050初始化(开启芯片,配置量程。中断等),hmc5883初始化(量程等),串口等初始化。在初始化环节,一个重要的初始化是mpu6050和hmc5883的校准,因为这些传...